Prediction of Successful Tire Assembly 🏎️
Jan, 2024
This project presents an attempt to find a solution for predicting the successful assembly of tires onto wheels autonomously. Currently, the existing approach uses purely an image based classification to predict whether the tire was assembled correctly. To enrich this, we attempt to use an LSTM model to analyze inputs from torque and force sensors of the assembling robot, enabling the system to determine the optimal conditions for tire assembly without human intervention.
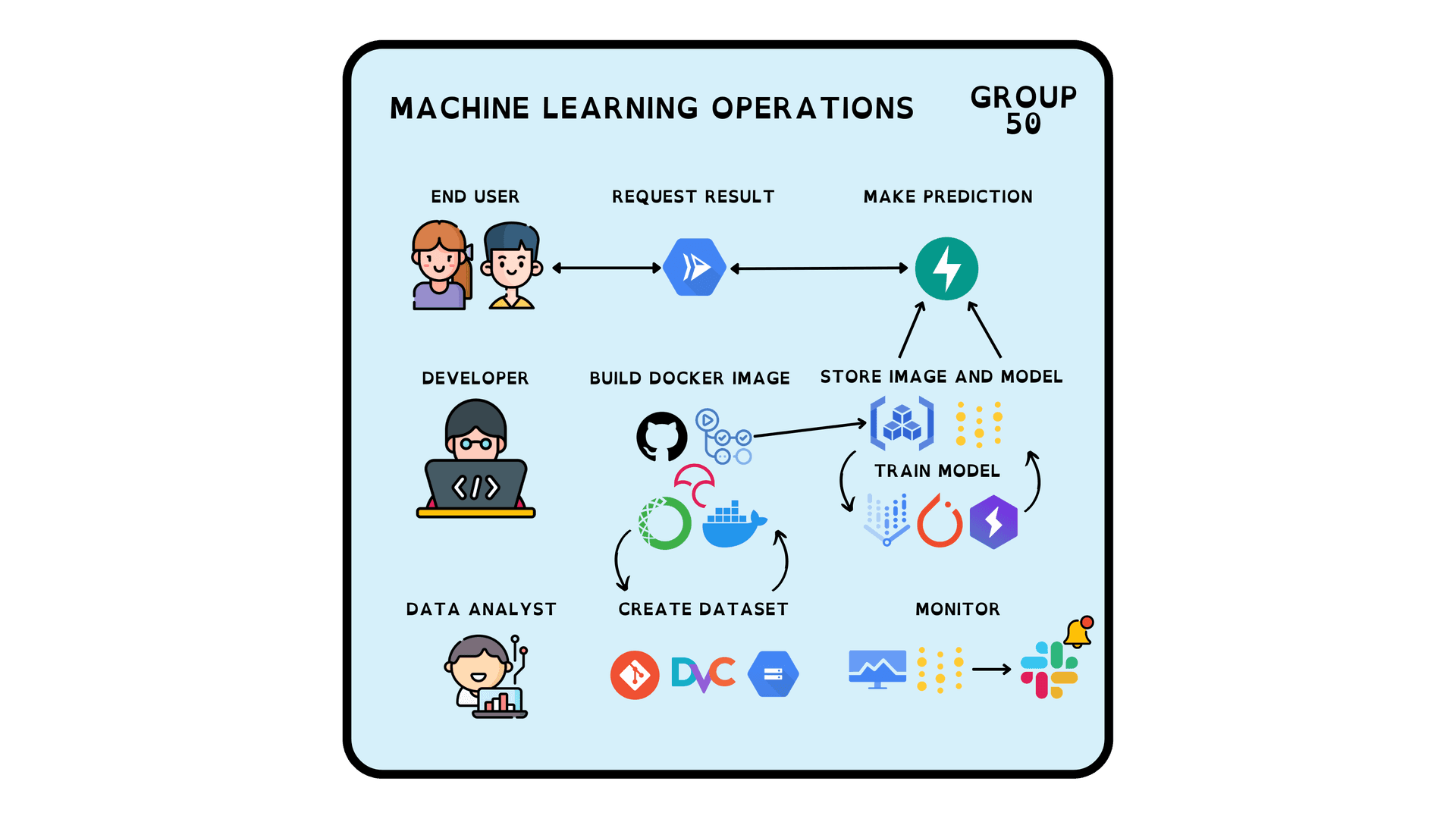
This end-to-end ML project additionally utilizes many different tools and frameworks such as Pytorch Lightning for modelling, DVC for data versioning, GCP for model training, W&B for monitoring FastAPI for exposing an inference endpoint, and others.
The project was done in collaboration with the Robotics lab at the CTU (Czech Technical University) in Prague which also provided all the necessary data for the project.
Check out the project's code on GitHub.